
Projects
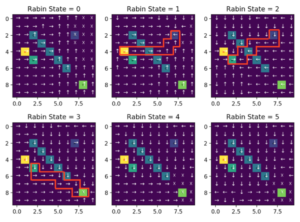
[PUBLICATION PREPRINT] Reduced Variance Deep Reinforcement Learning with Linear Temporal Logic
Labels: Deep Reinforcement Learning, Robot Motion Planning, Linear Temporal Logic(LTL)
Applied deep reinforcement learning techniques to solve LTL-based robot motion planning problems. And developed reduced variance algorithms to stabilized the output from the Neural Network.
[UNDER REVIEW] Deep Imitative Reinforcement Learning for Temporal Logic Robot Motion Planning with Noisy Semantic Observations.
Labels: Deep Reinforcement Learning, Imitation Learning, Robot Motion Planning, Model Checking
Designed planning experts that can guide the Q-learning agent toward convergence.
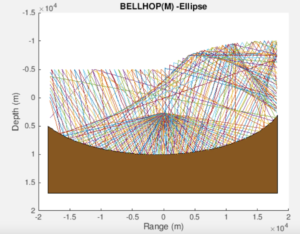
Mapping the Ocean Floor — Classifying underwater sonar data using Convolutional Neural Network (CNN)
Labels: Deep Neural Network, Acoustics, Sonar, MFCC
Applied CNN on simulated sonar data to identify underwater hills and valleys.

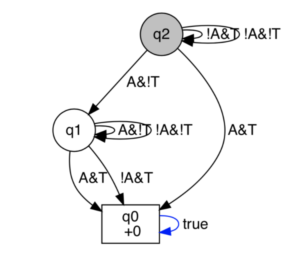
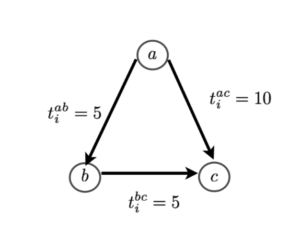
Product Automaton — A correct implementation of taking product between Non-deterministic Büchi Automaton and Finite Transition System
Labels: Motion Planning, Linear Temporal Logic, Python, MATLAB
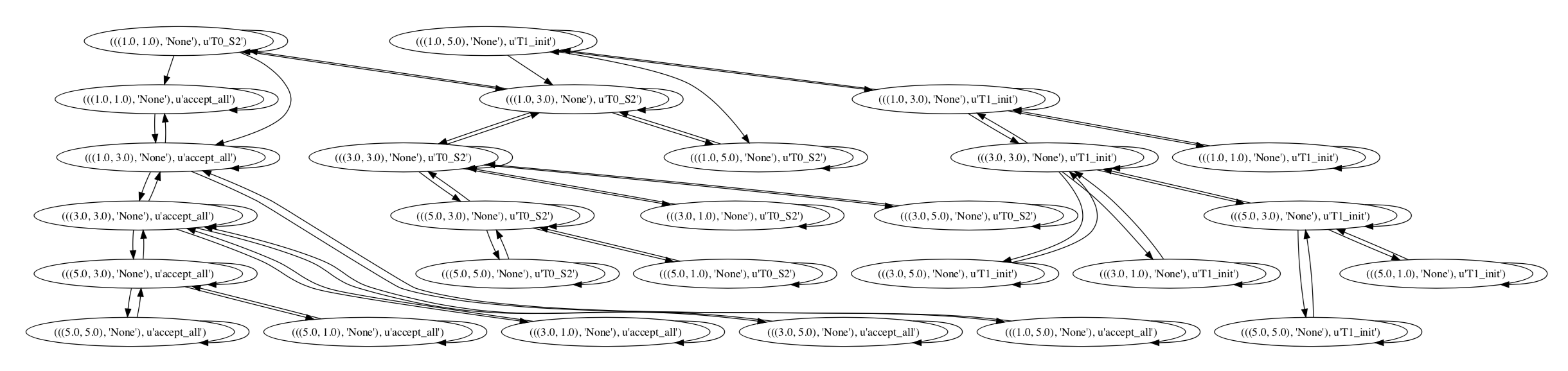
After figuring out some existing MATLAB package cannot correctly converting Linear Temporal Logic (LTL) to Büchi Automaton (ltl2ba), if negation exists in LTL, and hence cannot product a correct Product Automaton. I decided to create my own package.
Impact of Underlying Voting Distribution in Societal Tradeoff Rules
Labels: Societal Tradeoffs, Economics, Artificial Intelligence
This project explored a way optimizing the allocation of societal resources among voters and evaluated the reliability of existing approaches.
Distributed Robotics
Labels: Distributed Systems, Artificial Intelligence, Algorithms
Explored how systems of mobile robots interacting collaboratively. Experimented with cases such as how to cooperate on common tasks, and how to coordinate their motion through the world to reach individual goals.
Amazon Picking Challenge
Labels: Robotics, Gripper Design, System Integration
As part of Team Duke, I worked on designing a robot gripper that can grab and keep items with various shape and texture accurately and firmly and integrated it into a robotic system which can identify, pick up and collect items autonomously.
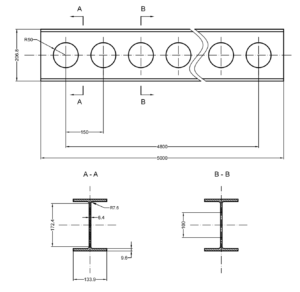
Analyzing Self-Designed Universal Beam by Finite Element Method
Labels: Universal Beam, Finite Element Method, Euler-Bernoulli Beam Theory
In this project, I designed a lightweight I-beam that can be applied on overhead crane for performance improvement. The yield strength and yield moment has been analyzed through finite element method and the result shows that the crane is well-supported by the newly designed beam in simulated working environment.
Miscellaneous
Brief Review of Poisson Image Editing
Labels: Image Editing, Numerical Analysis, Iterative Method
Summarized how to solve optimization problems in poisson editing by numerical iterative methods. (Click for the writeup)

![]()
Financial Case Study on Montessori Charter Schools
Labels: Social Innovation, Entrepreneurship, Financial Report
Charter schools play essential roles in primary and secondary education. However, a large part of closed Charter Schools are triggered by financial deficiencies. In this project I conducted case study on successful and unsuccessful Montessori Charter Schools and analyze the feasibility of constructing a successful Charter School in Raleigh-Durham area. (Click for the Writeup)